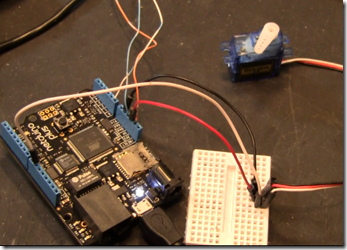
In this video I show how to connect a servo to a Netduino and also how to program the servo library into a new solution. The sweep program will drive the arm of the servo back and forth while the Knob program will move the arm of the servo when you turn a potentiometer.

Here is both solutions and a text file with the program that you can copy into a new solution.
If you don’t want to download the Zip file here is the code in three parts. First the Servo library class, then the sweep and knob programs.
I didn’t create the servo library class, an outstanding guy named Chris made it and I snagged it up off of the Netduino forum.